
本简短教程的目的是展示一种独特的爬墙方法,并说明1-DOF机械手(不包括夹具)的双重功能在技术上是3-DOF,因为机器人框架是移动/旋转的。
本文引用的地址:
规则基本上是这样的:
收集和取回未知大小/重量的物体。
电池容量严重受限。
机器人可以遥控。
允许的机器人高度/长度/宽度限制
规范
该机器人使用HS-311伺服机构来驱动料斗,一个改进的HS-805BB用于1-DOF机械手,一个伺服机构用于机器人手爪末端执行器,两个改进的伺服机构用于差动传动系统。

铲斗由弯曲的铝金属板制成,车架由铝原材料铣削和CNCe制成。
水桶里用了一种特殊形状的泡沫,防止里面的物体在爬墙时滚出。
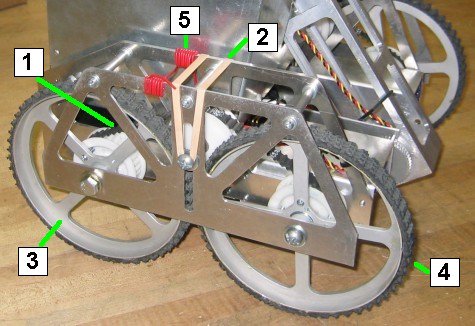
1)两侧车轮通过正时皮带连接,用于坦克行驶。
2)橡胶带用作皮带张紧器。
3)四个轮子是数控加工定制的。
4)传送带材料由于其高摩擦性能而粘在轮子和夹具上。
5) RC接收器天线,缠绕以避免缠绕。
控制器和驱动器
遥控器是Hitec Laser 6(有6个通道),每个通道分别控制每个伺服。
遥控机器人的灵活性很大程度上取决于驾驶员的技能。如果你曾经参加过遥控机器人比赛,那么驾驶员的技能将会显著影响机器人的表现。练习,练习,练习。确切地知道你的机器人将如何表现。你也应该在真实的环境中练习。我们甚至自己重建了测试流程,对机器人所做的一切进行计时以优化速度,并突破极限,看看机器人能做什么。在视频中,我用两只手同时操作遥控器上的五个伺服系统,这需要很多个小时的练习。但是一切都有了回报。
在我们重新创建的测试课程中,墙上的原型版本图像:

从视频中你可能不知道这一点,但当它爬墙时,手臂是用来平衡重量转移的——而不仅仅是一个升降机构。在攀爬的过程中,爪子也必须张开,以免折断。
在我们知道手臂的重量变化特征之前,这个由塑料制成的早期原型试图爬墙。尴尬的是,篮子被意外放下,机器人在过来的路上被卡住了。这个版本的抓钩由尼龙制成,在攀爬过程中会断裂。

困难
有两个主要的困难。首先传送带的材质,再加上凹槽传动的摩擦问题,使得地毯的铺设非常困难。在视频的最后,你会注意到机器人在转身时做着奇怪的舞蹈动作。这是司机试图弥补这个问题的技巧。另一个主要问题是臂扭矩。我们做了很多努力,让手臂非常轻,但足够结实,可以支撑机器人爬墙时的重量。如果你打算自己做一个,一定要先做力矩臂计算,确保足够强。我们必须使用外部齿轮来降低伺服速度,以获得足够的扭矩。

 微信扫码
微信扫码
 QQ扫码
QQ扫码
您的IP:10.3.203.204,2026-06-21 23:52:44,Processed in 0.1829 second(s).
